
Description:
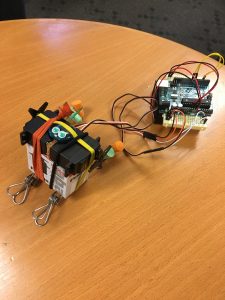
This week Molly and I teamed up to have a crawler for the TUI crawler challenge! We used 2 servomotors and a large battery pack, and some earplugs for grip on the carpet. It was difficult to stabilize the body – we tried markers, triangle shaped highlighters, and ended up using the servo box with clips to raise it.
Components
- 1x Bread board
- 1x Arduino
- 1x servomotor
- 1x box
- 2x paperclip
- 1x battery pack
- 4x ear plug
- 10x+ rubber bands and hair ties
Code
/*
* Code modified from this code: http://www.robotoid.com/appnotes/arduino-operating-two-servos.html
*/
#include
Servo servoLeft; // Define left servo
Servo servoRight; // Define right servo
int pos7 = 0;
int pos8 = 0;
void setup() {
servoLeft.attach(8); // Set left servo to digital pin 8
servoRight.attach(7); // Set right servo to digital pin 7
servoLeft.write(0);
servoRight.write(0);
}
void loop() { // Loop through motion tests
moveR(); // Example: move forward
moveL();
// moveR();
// moveL();
// moveR();
// moveL();
}
// Motion routines for forward, reverse, turns, and stop
void moveR() {
//servoLeft.write(0);
//servoRight.write(130);
for (pos7 = 0; pos7 <= 120; pos7 += 5) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
servoRight.write(pos7); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos7 = 120; pos7 >= 0; pos7 -= 10) { // goes from 180 degrees to 0 degrees
servoRight.write(pos7); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
void moveL() {
//servoLeft.write(130);
//servoRight.write(0);
for (pos8 = 0; pos8 <= 120; pos8 += 5) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
servoLeft.write(pos8); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos8 = 120; pos8 >= 0; pos8 -= 10) { // goes from 180 degrees to 0 degrees
servoLeft.write(pos8); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}