
Description
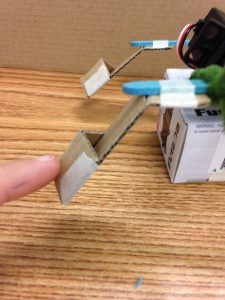
So my bot crawls, though mainly in circles (I believe the legs aren’t quite even). I tried to model my bot after knees, which are rigid in one direction (providing push) but bend in the other direction (to avoid undoing forward motion). I used binder clips to stabilize the bot’s base (the servo box) and prop the servo motor at a helpful angle.
Components
- Arduino UNO
- Servo motor
- hookup wires
- binder clips (1 very large, 1 small)
- cardboard, popsicle sticks, wood glue, tape, pipecleaners
Code
/* Sweep by BARRAGAN <http://barraganstudio.com> This example code is in the public domain. modified 8 Nov 2013 by Scott Fitzgerald http://www.arduino.cc/en/Tutorial/Sweep */ #include; Servo myservo; // create servo object to control a servo // twelve servo objects can be created on most boards int pos = 0; // variable to store the servo position void setup() { myservo.attach(7); // attaches the servo on pin 9 to the servo object } void loop() { for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees // in steps of 1 degree myservo.write(pos); // tell servo to go to position in variable 'pos' delay(4); // waits 15ms for the servo to reach the position } delay(200); for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees myservo.write(pos); // tell servo to go to position in variable 'pos' delay(4); // waits 15ms for the servo to reach the position } delay(200); }

 crawler-bot-video
crawler-bot-video