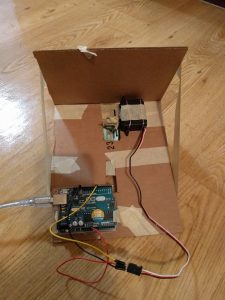
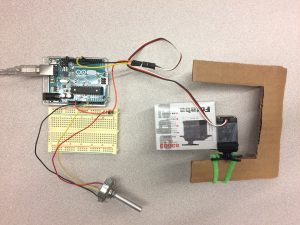
Ganesh and I worked on a proof of concept with one servo motor wherein we used a single wire to propel the servo forward. The motion is illustrated in the video at the link –
https://drive.google.com/open?id=0ByHw8c_nutT2ZVZ6WllBbUJpOVk
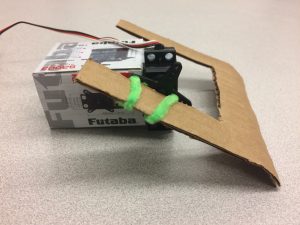
After trying various mechanisms, we picked this one with two legs made out of a single wire. The key in this arrangement is that the two legs are of different lengths. This enables each leg to alternately anchor and drag the motor while also drifting slightly sideways and the next step correcting for the sideways drift.
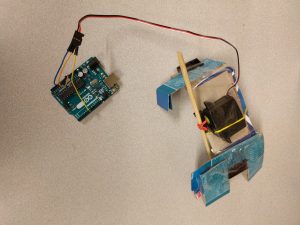
After being successful with the single motor and the mechanism, we tried using two motors to propel a stuffed toy supported on chopsticks. The idea being that the two motors would work in opposite directions – anchoring and propelling forward alternately (pic included below).

Code:
/*
* Servo Control Serial
* modified for TUI October 2007
* Servo Serial Better
* ——————-
*
* Created 18 October 2006
* copyleft 2006 Tod E. Kurt <tod@todbot.com>
* http://todbot.com/
*
* adapted from “http://itp.nyu.edu/physcomp/Labs/Servo”
*/
int servoPin1 = 7; // Control pin for servo motor
int servoPin2 = 8; // Control pin for servo motor
int pulseWidth = 0; // Amount to pulse the servo
long lastPulse = 0; // the time in millisecs of the last pulse
int refreshTime = 20; // the time in millisecs needed in between pulses
int val; // variable used to store data from serial port
int minPulse = 500; // minimum pulse width
int maxPulse = 2250; // maximum pulse width
void setup() {
pinMode(servoPin1, OUTPUT); // Set servo pin as an output pin
pinMode(servoPin2, OUTPUT); // Set servo pin as an output pin
pulseWidth = minPulse; // Set the motor position to the minimum
Serial.begin(9600); // connect to the serial port
Serial.println(“Servo control program ready”);
}
void loop() {
pulseWidth = (4 * (maxPulse-minPulse) / 8) + minPulse;
updateServo();
delay(1000);
pulseWidth = (8 * (maxPulse-minPulse) / 8) + minPulse;
updateServo();
delay(1000);
}
// called every loop().
// uses global variables servoPi, pulsewidth, lastPulse, & refreshTime
void updateServo() {
// pulse the servo again if rhe refresh time (20 ms) have passed:
if (millis() – lastPulse >= refreshTime) {
digitalWrite(servoPin1, HIGH); // Turn the motor on
digitalWrite(servoPin2, HIGH); // Turn the motor on
delayMicroseconds(pulseWidth); // Length of the pulse sets the motor position
digitalWrite(servoPin1, LOW); // Turn the motor off
digitalWrite(servoPin2, LOW); // Turn the motor off
lastPulse = millis(); // save the time of the last pulse
}
}